近期,受新冠疫情影响,人工智能研究院居家网络办公,全体人员克服各种困难常态化开展各项工作,积极推进各类科研项目落地,扎实促进研究院事业发展。特种机器人研究中心分别与天地(常州)自动化股份有限公司、中国铁塔股份有限公司徐州市分公司签署了项目合协议,分别就智能选矸机器人和基于5G的无人机智能巡检等多个人工智落地应用场景开展科研合作。
视频会议沟通项目进展
与天地(常州)自动化股份有限公司合作研发的智能选矸机器人可灵活布置于地面选矸皮带沿线,代替传统人工和现有的机械方式,实现大块矸石的分拣。研究中心主要负责研发基于视觉的煤矸柔性识别技术和基于手眼协同的拟人化柔性快速排矸技术。针对大块煤矸石分拣的瓶颈问题,围绕工业复杂环境下基于机器视觉的目标识别、基于视觉引导的机器人控制和非结构化环境中机器人的运动规划三大科学问题,突破复杂环境下动态煤矸石的识别、多动态目标多机械臂手眼协同操作和大负载高速运动规划控制三大关键技术,建立行业领先技术壁垒,形成具有经济效益的智能选矸机器人及技术体系。
大块煤矸石分拣的关键技术
除了在煤矿领域的AI场景落地应用,研究中心同时拓展在其他工业领域的人工智能技术应用,借助中国铁塔公司丰富的4G/5G资源和高密度铁塔分布优势,在智慧农业、智慧林业、智慧城市等多领域达成了合作意向和协议,近日与中国铁塔股份有限公司徐州市分公司签订的基于5G+高空瞭望与无人机立体感知的巡检系统,主要针对麦秆焚烧、森林火灾等安全隐患,利用机器嗅觉和机器视觉融合的多模态感知技术,实现智能巡检、火情智能监测、烟雾实时建图等功能,形成“高空铁塔+地面基站+区域无人机”的全方位立体感知和全天候实时智能巡检系统。
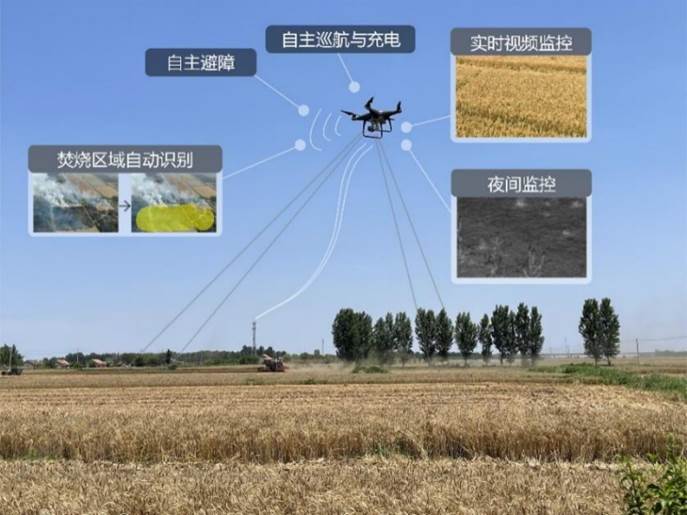
无人机立体感知巡检系统
特种机器人研究中心聚焦于机器视觉与机器人控制相结合的理论与应用研究,利用视觉、嗅觉等多模态感知手段,实现自主无人系统、多类型机器人系统实际场景中自主控制作业。通过产学研联合,突破煤矿机器人研发技术中的难题,实现机器人复杂多样化场景中的智能作业。


