复杂环境下的强化学习导航
本课题组围绕机器人与车辆控制主题,开展了多项基于强化学习的研究,主要包括基于强化学习的多机器人视觉导航与协调、强化学习增强复杂环境下的机器人导航、基于强化学习的移动机械手控制、基控增强算法的高效机器人任务学习等。
 基于强化学习的多机器人视觉导航
基于强化学习的多机器人视觉导航
在未知的、无地图的动态环境中,机器人应将自身的传感器信息与通过分散的信息交换机制传输的群体信息相结合,实现有效、稳定的导航和避障策略。在不依赖全局地图,也不依赖精确定位和即时引导的情况下,我们希望将摄像头、激光等传感器的第一人称视角数据直接作为机器人的感知输入,利用图神经网络(GNN)实现机器人之间在一定范围内的分布式信息交互,最终实现更广泛的信息感知和更高效的调度协调策略。在此过程中,我们将灵活运用深度强化学习、辅助任务、课程学习及相关方法,解决一系列科学与工程问题,提高多机器人导航系统的感知、调度、协调和决策能力。
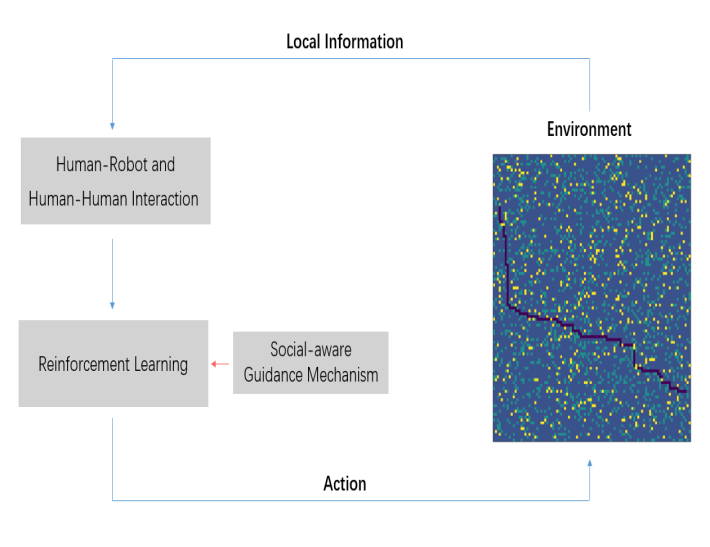
复杂环境下的强化学习导航系统
在一个有静态障碍物和动态人群的未知环境中,机器人仅利用自身传感器收集的局部信息,实现社会化感知、高效安全的导航以及避障。我们以机器人周围一定范围内的信息和周围行人的局部观察作为输入。注重通过图神经网络(GNNs)理解行人与机器人、行人与行人之间的行为交互,从而准确预测行人的轨迹,帮助机器人做出更具前瞻性的行为输出。在此过程中,我们采用深度强化学习、社会感知引导机制、模仿学习等方法,使机器人的导航过程遵循社会规则,对人类行为造成的影响较小。
目标检测

复杂环境下基于深度学习的多目标在线追踪
目标追踪是目标检测的延伸,近年来已经逐渐成为机器视觉研究的焦点。多目标追踪的挑战主要在于:(1)相互遮挡的环境使得目标特征缺失,轨迹中断;(2)不同目标的跨帧匹配。运动目标的时序信息可用来推断目标轨迹及特征,光流估计可有效捕捉帧间动态信息,我们希望建立多目标的时空关注模型,加强特征表示,同时使用深度估计、场景流估计等多种深度学习方法辅助推断轨迹,结合目标检测算法跨帧匹配目标

复杂环境下基于深度学习的煤矸石识别
基于深度学习进行目标检测已经成为当前机器视觉研究的热点,但在实际的生产应用中仍存在诸多挑战。一方面,实际生产环境较为复杂,目标物之间相互遮挡会造成特征损失;另一方面,基于深度学习的算法需要计算大量的参数,这对计算机的算力提出了一定的的要求。生成式对抗网络已经被证明具有较强的图像修复能力,我们希望通过该网络生成图像以降低特征损失,同时对基于深度学习的算法模型进行轻量化处理,提高检测的速度。最终我们将在矿下强遮挡环境中应用该算法对煤矸石进行实时识别。


