
基于深度学习的小目标检测
小目标检测一直是目标检测领域中的热点和难点,其主要挑战是小目标像素少,难以提取有效特征信息。在COCO数据集中,小目标占比44%,但检测准确度只有30%左右。在对小目标检测的研究中,我们从特征提取入手,注重目标纹理信息的提取,重建小目标特征,从而准确的检测小目标。在此过程中,我们采用提高特征分辨率(GAN),多尺度检测(FPN),数据增强等具体方法,以园区落叶为切入点,逐步解决园区垃圾检测中的落叶、烟头、纸巾等小目标的检测问题。
机器嗅觉
机器嗅觉是一种模拟生物嗅觉工作原理的新颖仿生检测技术,机器嗅觉系统通常由交叉敏感的化学传感器阵列和适当的计算机模式识别算法组成,可用于检测、分析和鉴别各种气味。气味分子被机器嗅觉系统中的传感器阵列吸附,产生电信号;生成的信号经各种方法加工处理与传输;将处理后的信号经计算机模式识别系统做出判断。
基于仿生智能算法的机器人主动嗅觉感知
针对危险气体源定位难、定位不准等问题,研究高效可行的气味源搜索策略是关键。我们将烟花和果蝇等仿生原理应用于机器人主动嗅觉领域,依靠群体智者行为搜索定位泄露气味源。研究这类仿生智能算法,仅依靠气味浓度信息便可实现气味追踪,从而规避风场不稳定引起的问题,并且在搜索效率和定位精度等方面展现出明显的优越性,为实现机器人智能嗅觉感知应用提供了切实可行的方案。
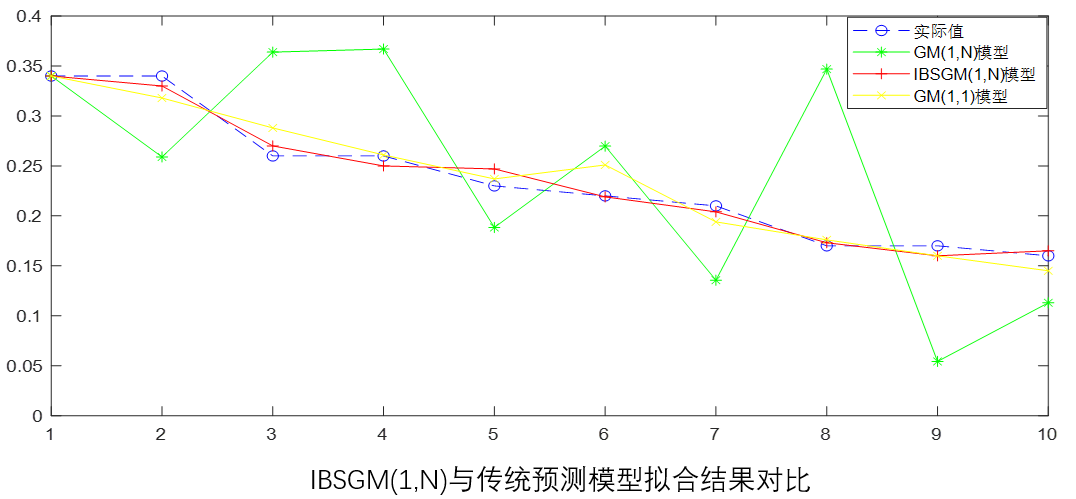
复杂场景下气体智能感知与预测
针对复杂环境中气体感知的一般问题,通过学习和预测方法达到快速感知与精准预测的目的。以复杂矿井环境下的瓦斯气体智能感知为例,我们提出了一种基于背景值和模型结构相容性改进的多变量灰色预测模型,解决了传统灰色预测模型结构单一、背景值构造方法不准确等问题,在小样本稀疏数据学习预测的基础上,有效提高了模型预测精度,实现了瓦斯气团生命周期的全程监管与预测,达到有效预防井下瓦斯灾害的目的。
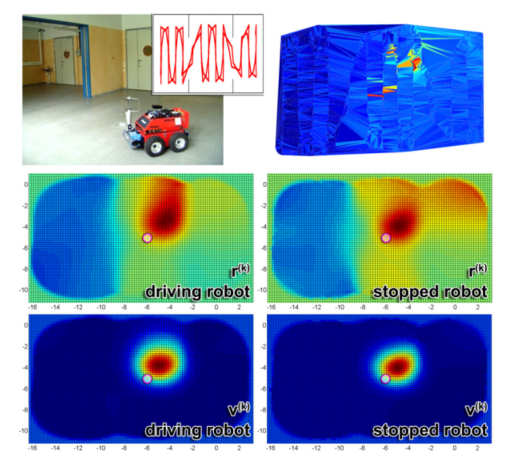
基于移动机器人的气体分布建模
在一个未知的、存在静态障碍物的气体扩散环境中,装有气体传感器的移动机器人测得一组相关变量时空分布数据并绘制气体浓度分布情况,对于气味源主动定位智能算法的改进具有重要借鉴意义。对气体分布进行建模是一项具有挑战性的任务,主要因为在许多现实情况下,气体被湍流、平流分散,产生了遵循混沌轨迹的气体包,导致气体浓度场的复杂性。相较于传统的静止传感器网络,基于移动机器人的气体分布建模可以提供具有自适应分辨率的气体分布模型,也可以根据当前的模型来决定下一步要观察哪些位置的可能性,因此气体分布建模是移动机器人技术的理想应用领域。


